|
CodeSubWars 0.4.7b
|
|


| |
|
CodeSubWars 0.4.7b
|
|
|
| |
#include <CSWGyroCompass.h>
Public Member Functions | |
| const Vector3D & | getForwardDirection () const |
| const Vector3D & | getUpDirection () const |
| double | getInclination () |
| double | getDirection () |
| double | getAxialInclination () |
 Public Member Functions inherited from CodeSubWars::CSWEquipment Public Member Functions inherited from CodeSubWars::CSWEquipment | |
| bool | isMoving () const |
| Public Member Functions inherited from CodeSubWars::CSWObject | |
| const std::string & | getName () const |
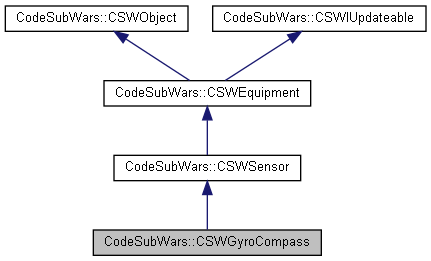
This class provides Compass like functionality.
| double CodeSubWars::CSWGyroCompass::getAxialInclination | ( | ) |
Returns the absolute axial inclination of the sensor in degree [-180, 180]. (turret from left to right) (rotation about z)
| double CodeSubWars::CSWGyroCompass::getDirection | ( | ) |
Returns the absolute rotation of the sensor in degree [0, 360]. (nose from left to right) (rotation about y)
| const Vector3D & CodeSubWars::CSWGyroCompass::getForwardDirection | ( | ) | const |
Returns the forward direction in world coordinates.
| double CodeSubWars::CSWGyroCompass::getInclination | ( | ) |
Returns the absolute inclination of the sensor in degree [-90, 90]. (nose from down to up) (rotation about x)
| const Vector3D & CodeSubWars::CSWGyroCompass::getUpDirection | ( | ) | const |
Returns the up direction in world coordinates.